فیلم آموزشی طراحی کنترل کننده PID با استفاده از الگوریتم های هوشمند (به زبان فارسی)
به جرأت می توان گفت که کنترل کننده تناسبی-انتگرالی-مشتقی یا به اختصار کنترل کننده PID، شناخته شده ترین مکانیزم کنترلی در میان سایر روش های کنترل می باشد. همچنین کنترل کننده PID پرکاربردترین کنترل کننده در صنعت است، تا جایی که اگر این کنترل کننده و خویشاوندان آن را، از صنعت کنونی حذف بکنیم، عملا بسیاری ار صنایع و کارخانه ها تعطیل خواهند شد.
درکنار قدرت، محبوبیت و سادگی این ساختار کنترلی، مشکلی وجود دارد که تا کنون راه حل دقیق و قطعی برای آن ارائه نشده است، و آن تعیین مقادیر مناسب ضرایب و ثوابت مربوط به این کنترل کننده است. هر چند روش های مختلفی برای حل این مشکل ارائه شده اند، اما تقریبا هیچ یک از روش های مذکور، دارای حوزه اثر کامل نیستند و نمی توان کارایی آن ها را در تمام موارد، تضمین کرد.
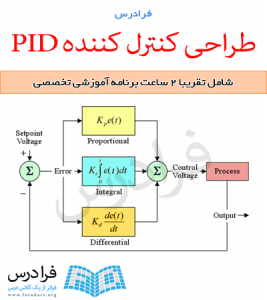
قدرت نهفته در ساختار الگوریتم های بهینه سازی هوشمند، می تواند به عنوان راه چاره ای برای تعیین ضرایب کنترل کننده PID در نظر گرفته شود. تا کنون در مقالات و کتاب های مختلف، از الگوریتم های بهینه سازی هوشمند (مانند الگوریتم ژنتیک و الگوریتم PSO) برای تنظیم کنترل کننده PID استفاده شده است. گروه آموزشی-پژوهشی متلب سایت، فیلم آموزشی کاملی در خصوص تنظیم ضرایب کنترل کننده PID با استفاده از الگوریتم های هوشمند تهیه نموده است، که به دانشجویان، محققین و مهندسین عزیز تقدیم می نماید. در این فیلم آموزشی از چهار الگوریتم بهینه سازی هوشمند، برای طراحی کنترل کننده PID استفاده شده است، که عبارتند از:
- الگوریتم ژنتیک یا GA
- الگوریتم بهینه سازی ازدحام ذرات یا PSO
- الگوریتم تکامل تفاضلی یا DE
- الگوریتم رقابت استعماری یا ICA
برای دریافت اطلاعات تکمیلی، بر روی لینک ادامه مطلب کلیک نمایید.
به جرأت می توان گفت که کنترل کننده تناسبی-انتگرالی-مشتقی یا به اختصار کنترل کننده PID، شناخته شده ترین مکانیزم کنترلی در میان سایر روش های کنترل می باشد. همچنین کنترل کننده PID پرکاربردترین کنترل کننده در صنعت است، تا جایی که اگر این کنترل کننده و خویشاوندان آن را، از صنعت کنونی حذف بکنیم، عملا بسیاری ار صنایع و کارخانه ها تعطیل خواهند شد.
درکنار قدرت، محبوبیت و سادگی این ساختار کنترلی، مشکلی وجود دارد که تا کنون راه حل دقیق و قطعی برای آن ارائه نشده است، و آن تعیین مقادیر مناسب ضرایب و ثوابت مربوط به این کنترل کننده است. هر چند روش های مختلفی برای حل این مشکل ارائه شده اند، اما تقریبا هیچ یک از روش های مذکور، دارای حوزه اثر کامل نیستند و نمی توان کارایی آن ها را در تمام موارد، تضمین کرد.
قدرت نهفته در ساختار الگوریتم های بهینه سازی هوشمند، می تواند به عنوان راه چاره ای برای تعیین ضرایب کنترل کننده PID در نظر گرفته شود. تا کنون در مقالات و کتاب های مختلف، از الگوریتم های بهینه سازی هوشمند (مانند الگوریتم ژنتیک و الگوریتم PSO) برای تنظیم کنترل کننده PID استفاده شده است. گروه آموزشی-پژوهشی متلب سایت، فیلم آموزشی کاملی در خصوص تنظیم ضرایب کنترل کننده PID با استفاده از الگوریتم های هوشمند تهیه نموده است، که به دانشجویان، محققین و مهندسین عزیز تقدیم می نماید. در این فیلم آموزشی از چهار الگوریتم بهینه سازی هوشمند، برای طراحی کنترل کننده PID استفاده شده است، که عبارتند از:
- الگوریتم ژنتیک یا GA
- الگوریتم بهینه سازی ازدحام ذرات یا PSO
- الگوریتم تکامل تفاضلی یا DE
- الگوریتم رقابت استعماری یا ICA
در این فیلم آموزشی، که محتوای آن به صورت کاملا عملی و به زبان فارسی روان تهیه شده است، با استفاده از برخی توابع موجود در جعبه ابزار سیستم های کنترل (Control System Toolbox) از نرم افزار متلب (MATLAB)، و یاری گرفتن از کدهای الگوریتم های بهینه سازی مذکور، برنامه هایی برای طراحی کنترل کننده PID برای سیستم های خطی پیاده سازی شده است. در طراحی کنترل کننده PID از خواص پاسخ پله سیستم حلقه بسته (مانند زمان نشست یا Settling Time و درصد فراجهش یا Overshoot) استفاده شده است. همچنین از موقعیت قطب های سیستم حلقه بسته نیز در ارزیابی کیفیت کنترل کننده PID بهره گرفته شده است.

برای مشاهده جزئیات و تهیه آموزش فرادرس طراحی کنترل کننده PID با استفاده از الگوریتم های هوشمند به این لینک (+) مراجعه نمایید.
مطالب پیشنهادی

مجموعه: فیلم های آموزشی, محصولات آموزشی, مهندسی برق, مهندسی کنترل

با سلام.
از این فیلم آموزشی استفاده کردم و خیلی راضی کننده بود. حرف نداره.
مرسی از استادای خوبتون. واقعا راضیم. مرسی.
سلام
این یک بهینه سازی خیلی خوبی برای PID شما آماده می کنه که میتونید توی پروژه های عملی حتی با میکروکنترلر ها ازش استفاده کنید. من همین کارو میکنم و واقعا راضی هستم.
سلام موقع اجرای برنامه با خطای زیر روبرو میشم اگه ممکنه کمکم کنید.
??? Undefined function or method ‘pid’ for input arguments of type ‘double’.
Error in ==> MyCost at 9
K=pid(kp,ki,kd,Tf);
پاسخ علی باغگلی:
به نظر می رسد شما تولباکس سیستم های کنترلی متلب را به صورت نصب شده ندارید!! همچنین نسخه متلب خود را نیز حتماً به روز نمایید.
موفق باشید.
متلب سایت – مرجع برنامه نویسی هوش مصنوعی
http://www.MatlabSite.com
سلام.
از این فیلم آموزشی استفاده کردم و خیلی عالی بود.
مرسی از همراهیتون
سلام
با تشکر از زحمات بی دریغتون
من فایلهای پیاده سازی سیستم های فازی رو دانلود کردم که ۵ تا بودن که بغیر از اولی که پسورد میخواست دادم بقیه هر چی تلاش کردم با پسورد باز نشدن دلیلش چی میتونه باشه؟ خواهشا با ایمیل جواب بدین چون خیلی ضروری و مورد نیازمه….مرسی
در پاسخ ar78:
با سلام
به حجم بخش های دانلود شده توجه نمایید و توضیحات موجود در ایمیل حاوی لینک های دانلود را به دقت مطالعه فرمایید در صورتی که مشکل شما برطرف نشد با شماره تماس های موجود در قسمت تماس با ما تماس حاصل نمایید.
موفق باشید
متلب سایت
با سلام و تشکر بخاطر آموزش خوبتون
اگر به جای تابع تبدیلی که تعریف کردیم ، یه سری معادله داشته باشیم که در اون ها هم پارامترهای مجهولی برای بهینه سازی وجود داشته باشه ، باید چیکار کنیم ؟
یعنی تابع تبدیل رو باید با توجه به اون پارامترهای مجهول ، چه جور بدست بیاریم ؟؟
با تشکر مجدد
در پاسخ احسان:
با سلام،
متاسفانه به علت عدم دسترسی اعضای هیئت علمی به سوالات شما در حال حاضر امکان پاسخگویی به سوالات موردی وجود ندارد.
مطمئن هستیم که این ناتوانی در پاسخگویی به سوال علمی شما، با نگرش مثبت شما نسبت به فعالیت سیستمی متلب سایت در گسترش دایره آموزش آکادمیک نادیده گرفته خواهد شد.
پیشاپیش از بذل توجه شما به این موضوع متشکریم.
متلب سایت
با سلام..
اگر به جای تابع تبدیلی که شما در متن برنامه با G تعریف کرده اید ، یک تابع تبدیل مرتبه بالاتر (اکیدا سره) و یا حتی یک سیستم ناپایدار قرار دهیم ، آیا با این برنامه می توان باز هم ضرایب PID را تعیین کرد ؟؟
مانند :
G=( (1.4147*s.^2)+(25.4301*s)+(22.5863) )/ ( (s.^4)+(3.7838*s.^3)+(54.634*s.^2)+(28.8957*s) );
من این کار را انجام دادم و با ERROR از برنامه مواجه شدم … اگر امکانش هست در مورد انتخاب تابع تبدیل های که می توان با این برنامه اجرا شود کمی توضیح دهید و اگر برنامه دارای محدودیت و ناتوانی در مورد استفاده طیف گسترده ای از تابع انتقال ها است ، توضیح دهید ؟
با سپاس فراوان از متلب سایت ، تنها سایت متلب
در پاسخ حمید:
با سلام.
هیات علمی متلب سایت تمام توان و تمرکز خود را بر روی تولید محصولات آموزشی جدید و بهینه سازی ساختار علمی سایت معطوف کرده و در عین تمام تمایل باطنی خود، از پاسخگویی به سوالات موردی علمی به دلیل محدودیت های زمانی معذور هستند.
موفق باشید.
سلام.
ببخشید توی این مجموعه طراحی کنترلر Fuzzy PID هم وجود داره؟ یعنی ضرایب PID توسط فازی بصورت self-tuning تنظیم بشه!
در پاسخ رضا
با سلام
الگوریتم های مورد بحث برای طراحی الگوریتم های زیر می باشند
الگوریتم ژنتیک یا GA
الگوریتم بهینه سازی ازدحام ذرات یا PSO
الگوریتم تکامل تفاضلی یا DE
الگوریتم رقابت استعماری یا ICA
موفق باشید
روابط عمومی فرادرس
با سلام
چه طوری می تونم فیلم رو دانلود کنم؟ قسمت دانلود نداره؟
در پاسخ به مهناز محمودی:
سلام.
برای مشاهده پیش نمایش و تهیه این آموزش لطفا گزینه ای که شما را به فرادرس هدایت می کند، کلیک نمایید؛ البته جهت سهولت دردسترسی، لینک صفحه مورد نظر در ادامه آمده است:
آموزش طراحی کنترل کننده PID با استفاده از الگوریتم های هوشمند
موفق و پیروز باشید.