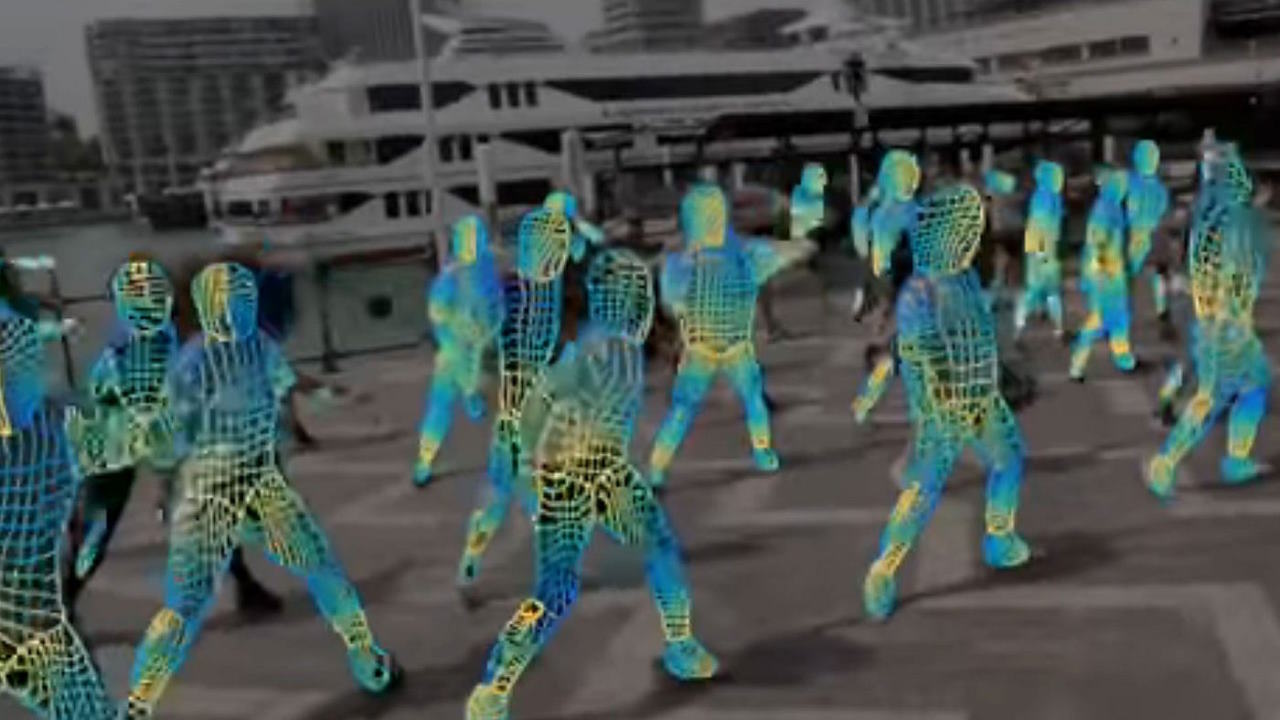
DensePose From WiFi چیست ؟ – روشی به صرفه برای سنجش حرکات انسان با وایفای
در این مطلب به طور خلاصه به این پرسش پاسخ داده میشود که DensePose From WiFi چیست و چگونه عمل…
در این مطلب به طور خلاصه به این پرسش پاسخ داده میشود که DensePose From WiFi چیست و چگونه عمل…
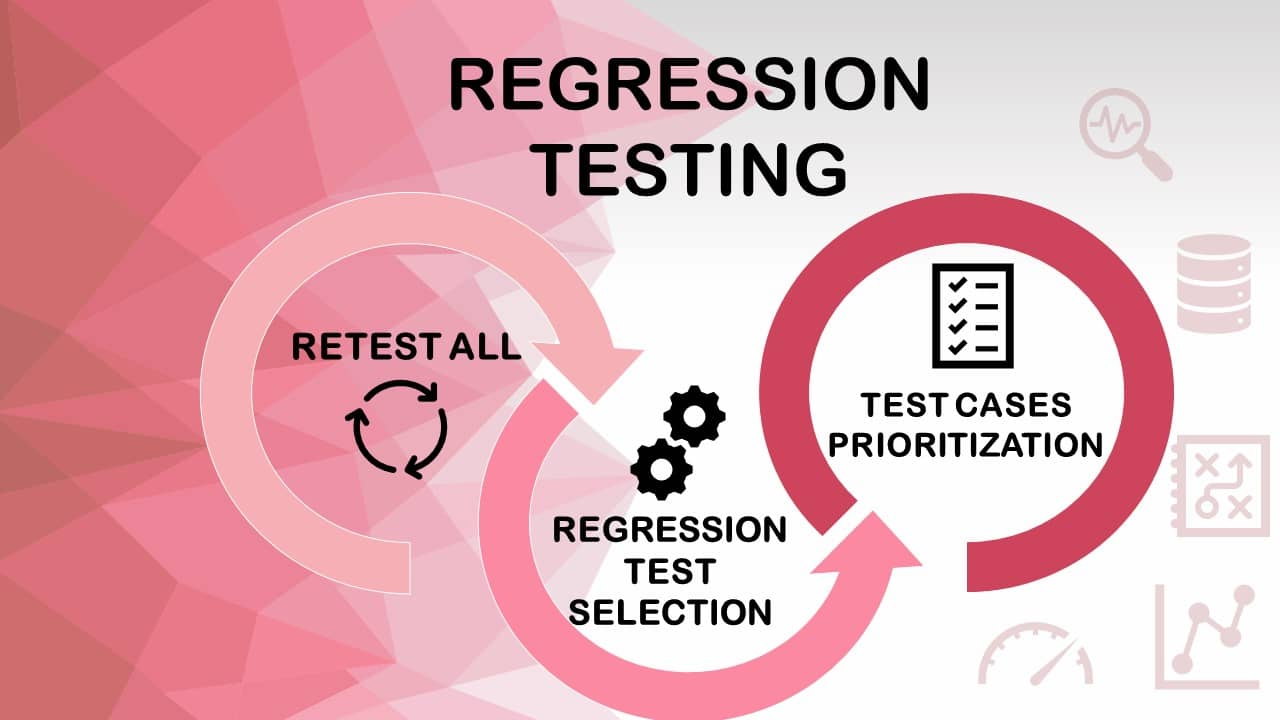
روش «Regression Testing» (تست پسرفت نرم افزار) به عنوان نوعی تست نرم افزار تعریف میشود. این روش برای تایید این…
«پسرفت نرمافزاری» (Software Regression) باگی در برنامه نویسی و توسعه نرم افزار به حساب میآید که باعث میشود نرم افزار…

به عنوان یک برنامهنویس به احتمال زیاد تاکنون در شرایطی قرار گرفتهاید که کدهای شما مطابق انتظار کار نمیکنند. این…

در این نوشته سعی شده است تا حد امکان به بیان ساده و شفاف توضیح داده شود که اصل Open…
گروه Google Brain تیم تحقیقاتی هوش مصنوعی با یادگیری عمیق است که به نوعی زیرمجموعه Google AI محسوب میشود. Google…
با توجه به همهگیری استفاده از تبلتها و گوشیهای موبایل هوشمند، به ویژه گوشیهای اندرویدی و در دسترستر بودن این…

در توسعه، ساخت و برنامه نویسی نرم افزار، Codebase یا Code Base مجموعهای از کدهای منبع است که برای ساخت…
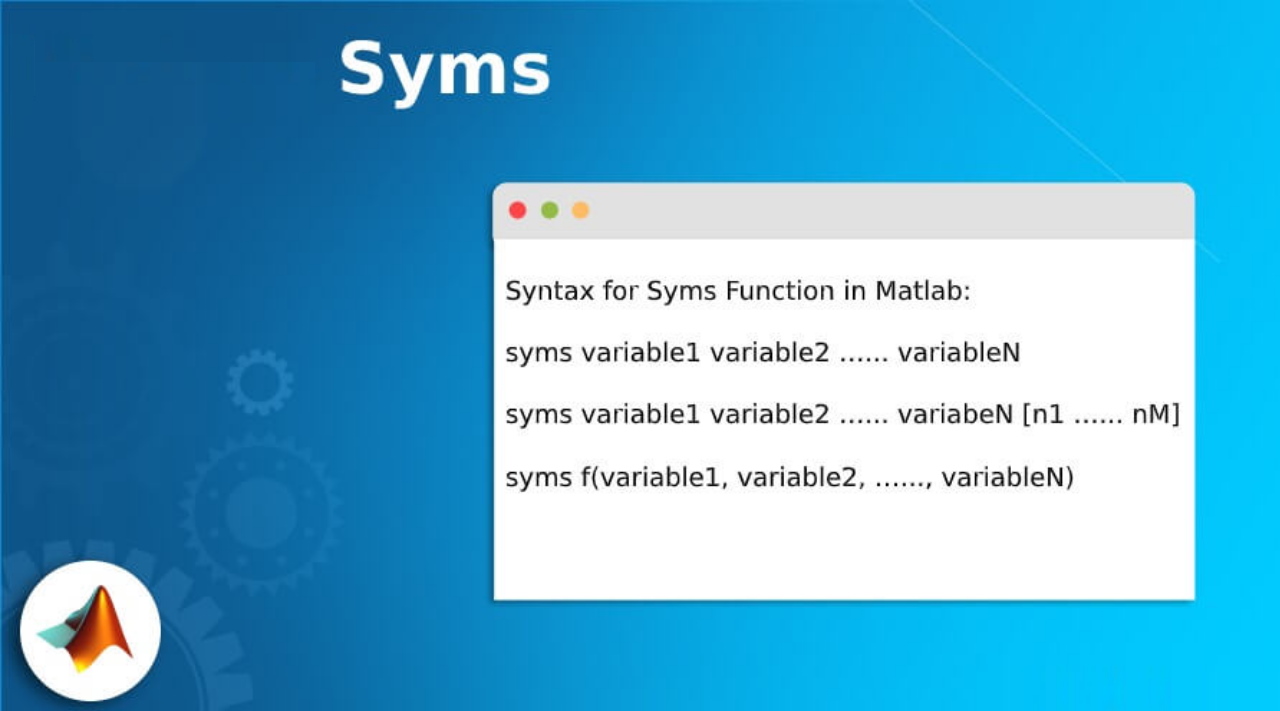
در متلب (Matlab)، دستور syms به عنوان میانبری برای تابع داخلی sym محسوب میشود. از این تابع میتوان برای ایجاد…
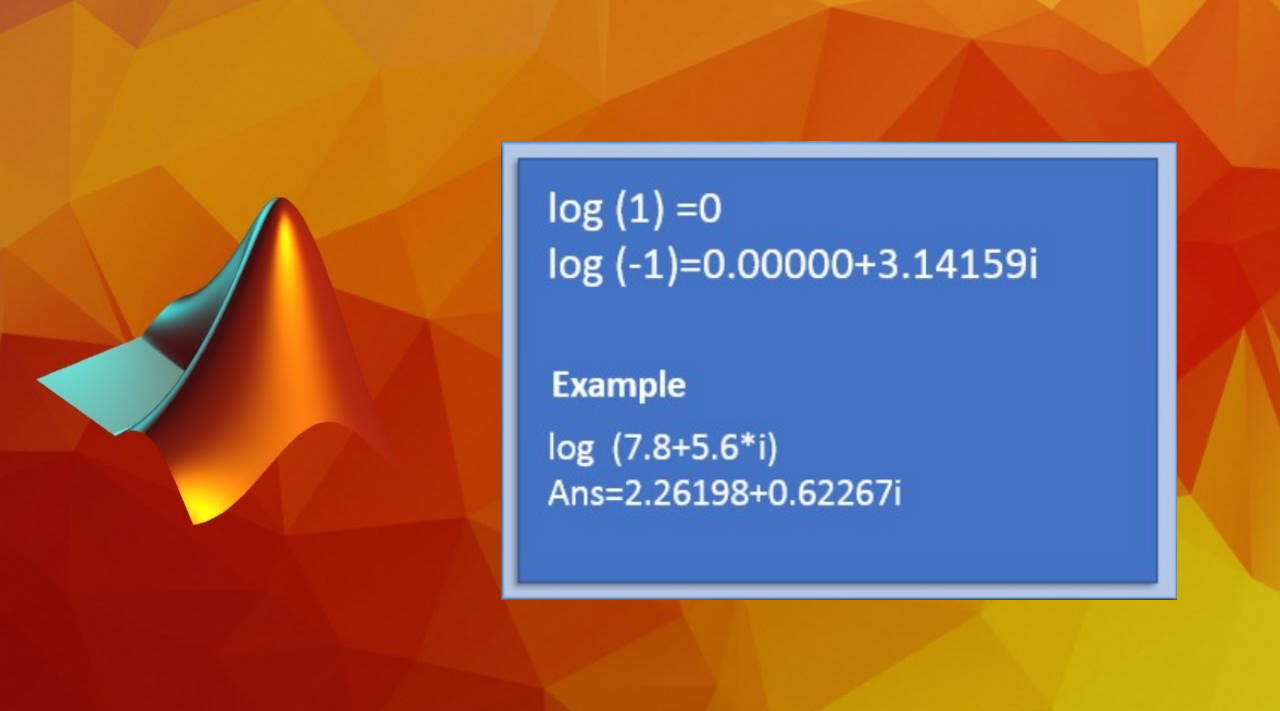
در این مقاله لگاریتم طبیعی در متلب (Matlab) آموزش داده شده است. لگاریتم چیست؟ لگاریتم به عنوان معکوس تابع نمایی…
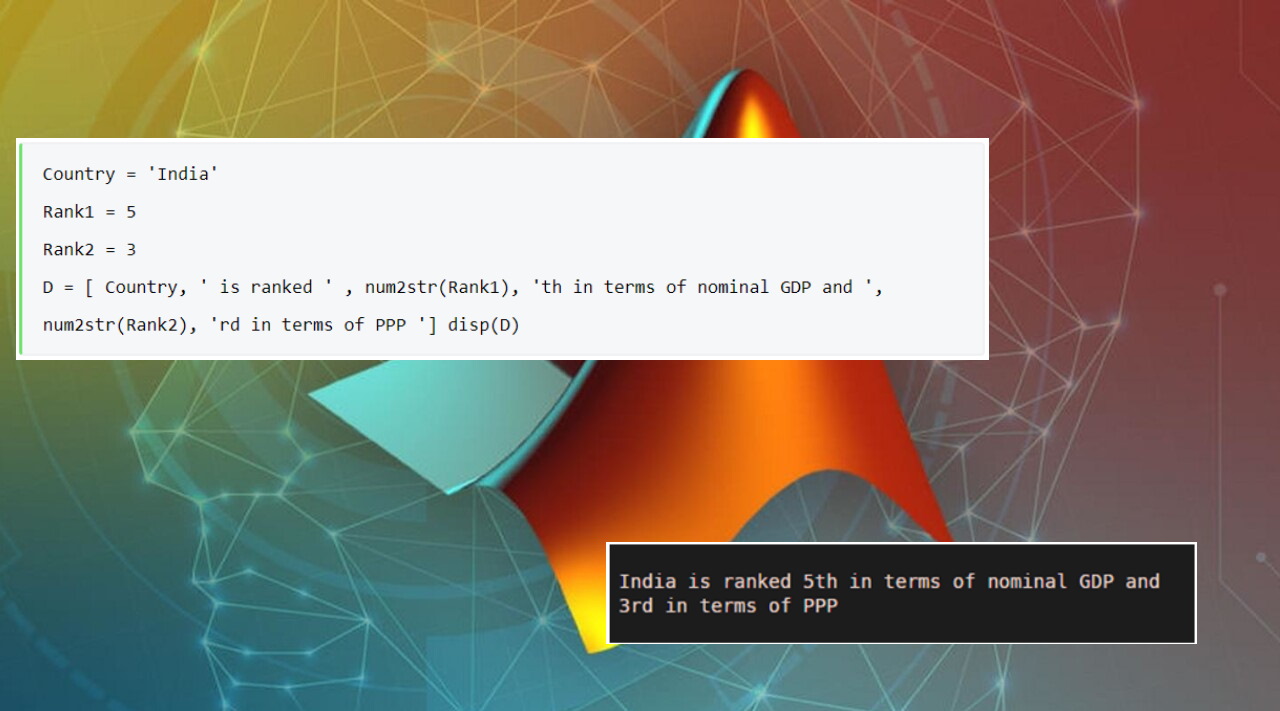
برای نمایش متن یا مقدار متغیرها از تابع disp در متلب استفاده میشود. در این نوشته به آموزش تابع disp…
در دنیایی که به وسیله «کلان دادهها» (Big Data) و «تجزیه و تحلیل داده» (Analytics) تحت تحولات عظیمی قرار گرفته…