آموزش آشنایی با شبیه سازی انواع ماشین های الکتریکی در سیمولینک متلب – مرور مفاهیم پایه

شبیه سازی در نرم افزار متلب به سه نوع کلی تقسیم می شود:
- شبیه سازی مبتنی بر کد نویسی
- شبیه سازی مبتنی بر بلوک دیاگرام
- تلفیقی از نوع ۱ و ۲ (نیمی از برنامه با استفاده از بلوک دیاگرام و بقیه به صورت کد نویسی)
شبیه سازی در نرم افزار متلب به سه نوع کلی تقسیم می شود:
- شبیه سازی مبتنی بر کد نویسی
- شبیه سازی مبتنی بر بلوک دیاگرام
- تلفیقی از نوع ۱ و ۲ (نیمی از برنامه با استفاده از بلوک دیاگرام و بقیه به صورت کد نویسی)
در بخش اول، با بلوک دیاگرام های آماده برای ماشین های الکتریکی در نرم افزار متلب آشنا می شویم و در بخشهای بعد کد نویسی برای ماشین های سنکرون را توصیف خواهیم کرد.
با تایپ عبارت Simulink (در command window) وارد محیط می شویم:a
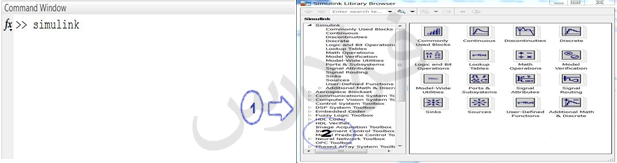
شکل (۱)
در سمت چپ، کتابخانه های مختلف برای رشته های مختلف و در حوزه های مختلف وجود دارد. کتابخانه Simulink یک کتابخانه عمومی در بین همه کتابخانه های دیگر است به همین دلیل در ابتدای کتابخانه آمده است. در کتابخانه Simscape اگر SimPowerSystems را انتخاب کنیم وارد حوزه قدرت در نرم افزار متلب می شویم(در نسخه های قبلی SimPowerSystems به صورت کتابخانه مستقل وجود داشته است). انواع ابزارهای قدرتی در SimPowerSystems مشاهده می شود: منابع الکتریکی (Electrical Sources)، اندازه گیرها (Measurements)، المان های الکترونیک قدرت (Power Electronics)، ماشین های الکتریکی (Machines) و…. در آدرس Library: Simscape/SimPowerSystems/Machines می توانید انواع ماشین-های مختلف (سنکرون، آسنکرون، مغناطیس دائم، سوئیچ رلوکتانس، استپر و….) را مشاهده کنید. بلوک های ماشین القایی: برای ماشین های القایی دو بلوک دیاگرام قرار داده شده است. از لحاظ عملکردی تفاوتی با هم ندارند، فقط در یکی واحدهای SI و دیگری به صورت پریونیتی (PU) می باشد. برای ایجاد صفحه مدل بر روی کلیک می کنیم.
با راست کلیک کردن بر روی هر بلوک و انتخاب گزینه Add to a new model بلوک مورد نظر وارد صفحه مدل می شود.
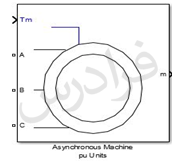
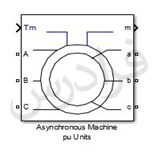
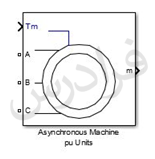
بلوک Asynchronous Machine pu Units رو به صفحه مدل اضافه می کنیم.
همانطور که در شکل زیر مشاهده می شود ورودی های A,B,C (در واقع منبع ولتاژ سه فاز)،T_m گشتاور ورودی و m مجموع سیگنال های خروجی. سیگنال های خروجی که این مدل به ما می دهد مجموعه ولتاژها، مجموعه جریان ها، گشتاور، سرعت.
با راست کلیک کردن بر روی بلوک زیر و انتخاب گزینه help توضیحاتی در رابطه با بلوک مورد نظر داده شده است. (help متلب کامل ترین مرجع برای یادگیری نرم افزار می باشد)
شکل (۲)
به عنوان مثال، توضیحاتی در رابطه با عملکرد ژنراتوری و موتوری:
اگر عدد مثبت را به اختصاص دهیم به صورت موتوری عمل می کند و اگر منفی دهیم به صورت ژنراتوری عمل خواهد کرد.
نتیجه: هر ماشینی داشته باشیم هم می تواند به صورت موتوری عمل کند و هم به صورت ژنراتوری بستگی دارد که جهت گشتاور به چه صورت باشد.
مثبت در عمل به معنای این است که یه جرمی که روی شفت موتور قرار دارد یا تسمه پروانه ای که موتور دارد می چرخاند.
منفی به معنای این است که یک نیروی مکانیکی و انرژی مکانیکی به صورت انرژی جنبشی به ماشین می دهیم و شفت رو خودمان می گردانیم و در سه سیم پیچ استاتور جریان رو می کشیم و ولتاژ را می سازیم.
مدل الکتریکی ماشین آسنکرون که در نرم افزار متلب استفاده شده به صورت زیر می باشد:
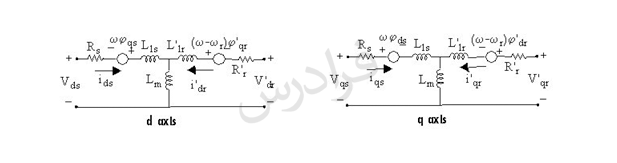
مدل استفاده شده در فوق در محور d-q می باشد. محور d همان محور ماکزیمم شار هست و محور q محور مینیمم شار. محور q و محور d عمود بر هم هستند.
در مدل فوق همه ی پارامترهای رتور به سمت استاتور منتقل شده و ماشین بر اساس مدل نمایش داده شده عمل می کند.
پارامتر دهی:
برای پارامتر دهی بر روی بلوک مورد نظر دو بار کلیک می کنیم:
با دو بار کلیک کردن بر روی بلوک صفحه های مطابق شکل روبه رو باز می گردد.
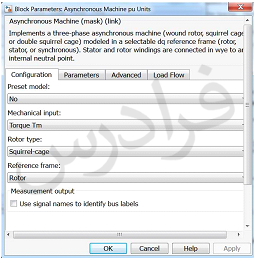
شکل (۳)
پنجره configuration:
preset model:
در قسمت preset model اگر پنجره کرکره ای رو باز کنیم یک سری مدل های پیش فرض قرار دارد (در مواردی که پارامترهای یک موتور القایی را نمی دانیم در چه حدی هستند از مدل های پیش فرض استفاده می کنیم). در صورتی که نخواهیم از مدل های پیش فرض استفاده کنیم گزینه No را انتخاب می کنیم.
نکته: مدل های از پیش تنظیم شده پارامترهای اشباع را ندارند و باید وارد کنیم.
ورودی مکانیکی (Mechanical input): می توانیم به صورت گشتاور (یک عدد بر حسب N.m)، به صورت سرعت ورودی و به صورت پورت گردان مکانیکی (در موارد خاص که در کتابخانه های دیگر مثل sim scape یک سری پورت Mechanical rotational هستند که می توانیم آنها را به ورودی گشتاور ماشین متصل کنیم)
نوع رتور (Rotor type):
همان طور که میدانید در ماشین القایی رتور یا به صورت سیم پیچی هست و یا اینکه سیم پیچی ندارد و به صورت قفس سنجابی می باشد.
نکته: رتور سیم پیچی این مزیت را دارد که ما می توانیم سه سر خروجی رتور را داشته باشیم و یک مقاومت خروجی اضافه کنیم تا موتور با جریان راه اندازی خیلی کم راه اندازی شود و بعد از راه اندازی به تدریج مقاومت رو خارج کنیم. در قفس سنجابی نمی توانیم از مقاومت استفاده کنیم.
Reference frame:
در این قسمت محور مرجعی که برای معادلات استفاده می کنیم مشخص می شود.
یادآوری: ورودی های ولتاژ ما در عمل سه فاز می باشد و برای تحلیل ماشین راحت تر است که ورودی های سه فاز را به دو فاز تبدیل کنیم، از تبدیل abc به d-q استفاده کنیم.
اگر در پنجره کرکره ای Reference frame گزینه روتور را انتخاب کنیم در واقع از تبدیل پارک استفاده می کنیم.
اگر گزینه Stationary رو انتخاب کنیم محور مرجع ساکن است که به نوعی از تبدیل کلارک (αوβ) استفاده می کنیم.
اگر گزینه Synchronous رو انتخاب کنیم که همان محور مرجع سنکرون می باشد.
Mask units:
واحدها هستند برحسب p.u و SI
نکته: اگر در قسمت configuration/Rotor type وارد شده و نوع رتور را wound قرار دهیم بلوک نشان داده شده در شکل (۲) به صورت زیر ظاهر می گردد:
شکل (۴)
سه سر a,b,c سرهای خروجی رتور می باشند (از نظر گرافیکی پارامترهایی که به بدنه داخلی متصل هستند پارامترهای رتور و پارامترهایی که به بدنه خارجی متصل هستند پارامترهای استاتور)
اگر نوع رتور را قفس سنجابی انتخاب شود به صورت زیر ظاهر می گردد:
در شکل فوق سه سر خروجی a,b,c که در شکل (۴) وجود داشت با انتخاب گزینه Squirrel-cage حذف می گردد، بدین معنی که دیگر ما نمی توانیم در سیم پیچی های رتور اثر داشته باشیم.
مطالب پیشنهادی

مجموعه: اخبار و تازه ها
